Õppeprotsessi kirjeldamine kasutades 6D ruumimudelit
Teadmiste ja loovuse arendamist saab väljendada kahe erinevat tüüpi ruumi ühtesidumise (integreerimise) kaudu. Need kaks ruumi tüüpi on geograafiline- ja teostusruum. Geograafiline ruum on teostusruumi alamruum (destillaat). See on põhiolemuselt staatiline. Liikumine realiseeritakse ruumiliste ühenduste kaudu, mis eksisteerivad subjekti ja objekti vahel või ümberformuleerituna, allikate ja ressursside vahel.
Tehniliste ainete (näit. automatiseerimine) õppematerjali sisu on tihti raske mõista. Sel juhul on kohane struktureerida õppimist, kasutades 6D koordinaatteljestiku. 6D süsteem on mõtteliselt tajutav, visuaalselt kujutatav kuid ometi ka reaalsusega seotav objekt, mis aitab kirjeldada ja integreerida mitte ainult üksuse geograafilisi omadusi vaid ka üksuste teostuskirjeldusi (interaktsioone).
Kaasaegne lähenemisviis õppimisele sisaldab teadmiste ja oskuste omandamist koosmõjus ehk komplekselt. Üliõpilaste kompetentsust arendatakse rakendades praktiliselt ja universaalselt toimivaid põhiprintsiipe.
Tööstusautomaatiku ja mehhatrooniku kutsekompetentsi tähtsad omadused on:
- Loovus – üliõpilaste tunnetuslik (kognitiivne) tegevus, tehnilise informatsiooni uurimuse analüüs, formuleerida ja fundamentaalselt lahendada uusi probleeme automaatika vallas;
- Innovatsioon ja efektiivsus – loovuse tulemuste edukas elluviimine kutsetegevuse kaudu nii isiklikus elus kui ka ettevõttes;
- Mobiilsus – valmisolek tõsta olemasolevate kogemuste ja teadmiste taset et kohandada neid muutuvate majandustingimustega;
- Perspektiiv – valmisolek jätkata haridusteed, enesearendamine, kutsealane ja isiklik areng.
Nende kompetentside arendamiseks on kõige asjakohasem kasutada kombineeritud õpet. Tänapäeva seisukohalt põhineb kombineeritud õpe tõhusal „segul“ traditsioonilisest ja kaugõppe tehnoloogiatest ja uuenduslikel pedagoogilistel õpetamismeetoditel. Informatsiooniajastul osalevad toodete tootmisega seotud töötajad regulaarselt täiendkoolitusel. See tähendab seda, et inimesed vajavad erinevaid haridusvahendeid (ressursse, seadmeid) ja nende jaotussüsteeme ja samuti ka üldist platvormi suhtlemiseks ja koostööks [129].
Joonis 6.5 Automatiseeritud tootmissüsteemi struktuur [129]
Hariduse sisus kasutatud kontseptsioonid on struktureeritud. Näiteks Joonis 6.5 on näidatud automatiseeritud tootmissüsteemide üldstruktuuri skeem, mida saab kasutada õppematerjalina [130]. Innovatiivsed arendajad kasutavad informatsiooni, energiat ja füüsilist tootmistehnoloogiat koos kaasaegsete arendusmeetoditega automatiseeritud tootmissüsteemi loomiseks. Inimesed, automaatsed juhtimissüsteemid ja juhitav energeetiline (osaliselt mehhaaniline) seade integreeritakse süsteemi arendamise ajal. Uued tootmisseadmed võimaldavad toota keerulisemaid tooteid lühema ajaga. Toodete tootmisel kasutatud uuenduslik tehnoloogia muutub samuti üha keerukamaks.
Kaasaegsel lähenemisel õppimisele ja õpetamisele kasutatakse olemasolevaid ja uusi esile kerkivaid õpetamismeetodeid, kuid unustatakse sageli formaalne keel ja sellega seotud terminoloogia. Keele omandamine on abstraktne protsess, mille abil õpetajad ja üliõpilased omandavad võime tajuda ja mõista informatsiooni ja ka produtseerida ja tarbida sõnu või muud tüüpi sümboleid üksteisega suhtlemiseks. Materiaalne sisu liigub subjekti jaoks piltlikult öeldes sümbolite taga. See sisu asub subjektide ja objektide vahelises ruumis mitte nende geograafilistes punktides. Keele kasutamine erinevates olukordades nõuab, et õpetajad ja õpilased võtaksid kasutusele uusi ja erinevaid tööriistu ja meetodeid. Tööriistad sisaldavad sageli süntaksi analüüsijaid, mis ei arvesta kasutatud sõnade tähendust ja semantika analüüsijaid, mis annavad tõlgendatud tähendused formaalse keele sümbolitele. Neid tööriistu kasutatakse kombineeritult, näiteks sümboolne väljend esitab tegelikkuses oleva sisu kvaliteedi, kvantiteedi või aja väärtusi.
Joonis 6.6 esitab süntaktiliste üksuste kolme-mõõtmelise (3D) vaate, mis on organiseeritud formaalse keele ümber. Tuleks mõista, et formaalse keele terminid ja väljendid omavad spetsiifilist sisu väärtust, mida nimetatakse kvaliteediks. Sümboolsete terminite väärtused on erinevad. Seega on vaja uut dimensiooni, et defineerida sümboolse sisu kvaliteedi väärtust.

Joonis 6.6 Süntaksiüksuste organisatsioon; formaalse keele kvaliteedi mudel [56].
Teooria on formaalne süsteem, mis sisaldab formaalses keeles lausete kogumit. Teadlased tegelevad formaalsete teooriatega. Teaduslikud teooriad on üldiselt keerulisemad kui seadused või eeskirjad.
Teooriatel on palju osi ja nende muutumine on tõenäoline, kuna arenev teadus teeb kättesaadavaks üha uued andmed ja analüüsitööriistad. Teoreetiliste teeside (väidete) tõestuseks kasutatakse tegelikke eksperimente. Teooria on teaduslik tööriist. Teadlased või teised subjektid nagu üliõpilased „vaatavad“ huvitavaid objekte või isegi nende erinevaid reaalseid omadusi läbi „teoreetiliste prillide“. Vaatleja on ühendatud reaalse materjali üksustega sümboolse üksuste kaudu. Formaalse maski struktuur on visualiseeritud Joonis 6.6. Joonis 6.7 näitab teadlast, kes vaatab huvitavat reaalset objekti läbi süntaktilise üksuse („3 D formaalne mask“).
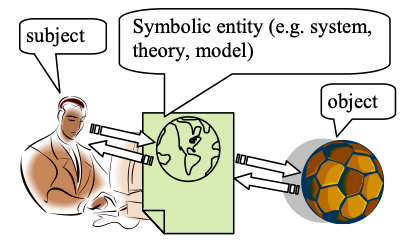
Joonis 6.7 Formaalne teooria on „poolläbipaistev sümboolne mask“ [56]
Viiel aksioomil põhinev tuntud teoreetiline süsteem on näiteks Eukleidese geomeetria. Meetodi kohaselt, mis sarnaneb Eukleidese omale, sisaldab iga teaduslik teooria mõtestatud kontseptsioonide kogu ja tõeseid või tõeks peetavaid väiteid. Metafüüsiline teooria on piiratum, s.t. vähem asju on metafüüsiliselt võimalikud kui loogiliselt on võimalikud. Metafüüsiline teooria võib peegeldada mõningaid teadmiste aluseks olevaid (sügavaid) fakte maailma kohta. Selle täpne suhe füüsikasse ja füüsikalisse võimalusse on õpetajate ja üliõpilaste vahelise vaidluse küsimus.Definitsiooni järgi on 3D geomeetriline ruum kuue-dimensioonilise (6D) ruumi alamruum. Keerukam liikumine ilmneb vaatlejale geomeetrilises ruumis. 3D punktid määratlevad (kvantifitseerivad) lõpmatult väikeseid (kondenseeritud) asukohti 6D ruumis milles eksisteerib liikumine. Liikumise põhjus on alati väljaspool neid 3D punkte.